Leica 激光跟踪仪标定及测试培训需求文档
| 修订日期 | 修订版本 | 修订内容 | 修订人 |
|---|---|---|---|
| 2025.07.14 | V1.0 | 初始化文档 | 袁紫衣 |
对接方: Leica 培训团队
需求方: 机器人测试团队
1. 培训目标
本次培训旨在使机器人测试人员掌握以下技能:
- 使用 Leica 激光跟踪仪 对 6 自由度机械臂进行高精度标定和测试。
- 理解机械臂建模、标定空间确定及 ISO 9283 / GB 12642 标准下的精度测试方法(位姿准确度、重复性、距离精度、轨迹速度等)。
- 能够独立完成测试数据分析及报告生成。
2. 培训内容
2.1 基本功能介绍
- Leica 激光跟踪仪(如 AT960)在机械臂测试中的核心作用:
- 高精度位姿测量(μm 级精度)。
- 动态轨迹捕捉(如速度、重复性测试)。
- GB 12642 标准关键测试项:
- 位姿准确度(AP)与重复性(RP)。
- 距离准确度(AD)与重复性(RD)。
- 轨迹速度(如速率漂移、轨迹准确度/重复性)。
2.2 软硬件介绍和操作
硬件部分
- Leica 激光跟踪仪:
- 硬件组成(跟踪头、控制器、靶球/SMR、T-Probe 等)。
- 设备架设、校准及环境要求(温湿度、振动控制)。
- 机械臂适配工具:
- 末端靶标安装(静态与动态测量模式)。
- 反射靶球(SMR)的选择与使用。
软件部分
- Leica 配套软件(如 SpatialAnalyzer):
- 数据采集界面与实时监控。
- 坐标系对齐(机械臂基坐标系与跟踪仪坐标系转换)。
- 点云数据处理与误差分析。
2.3 机械臂建模
- 运动学模型建立:
- DH 参数导入与验证。
- 理论模型与实际测量的偏差分析。
- 模型优化:
- 基于 Leica 测量数据的参数修正(如关节零位补偿)。
2.4 机械臂标定与标定空间确定
- 标定流程:
- 单点静态标定(关节角度-位姿映射)。
- 工作空间测量:
- 生成 3D 标定空间点云模型。
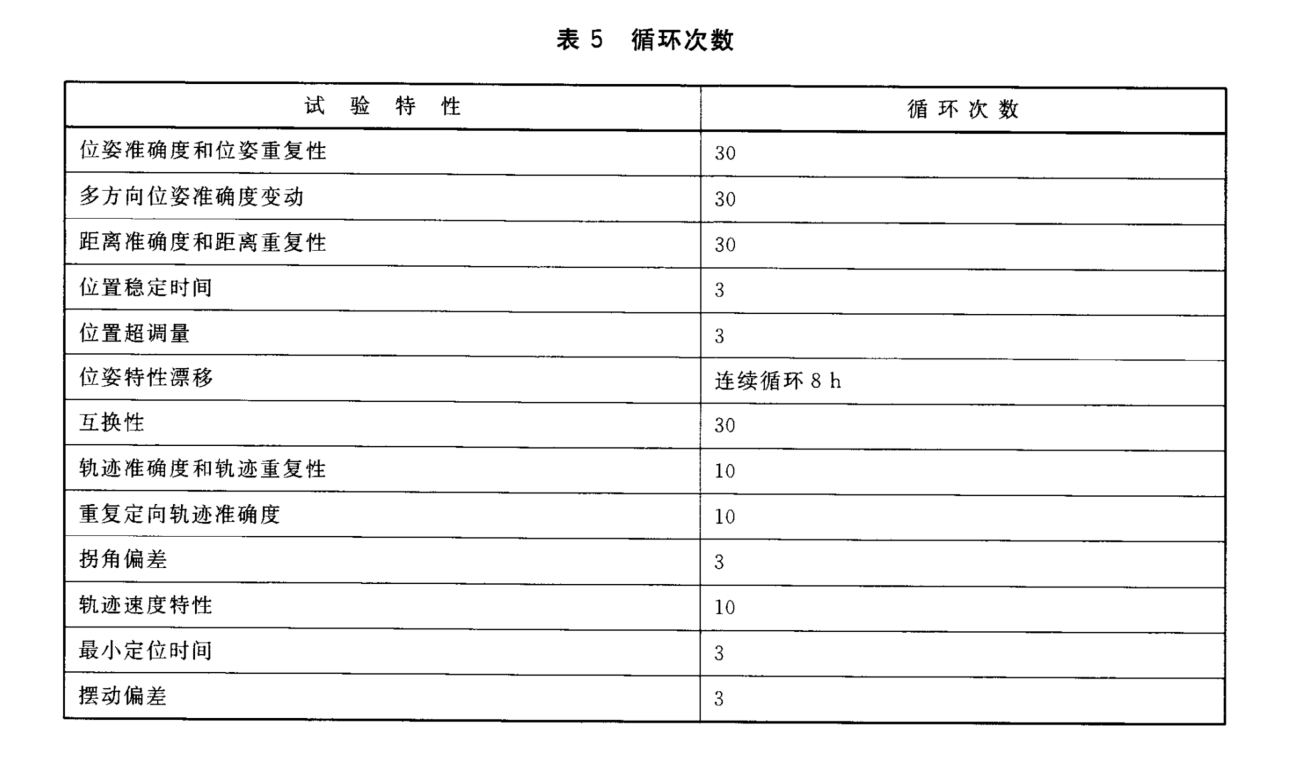
2.5 GB 12642 标准测试项目
测试项目与执行方法
按照 GB 12642 进行测试
3. 培训安排
- 时长:2 天(理论 0.5 天 + 实操 1.5 天)。
- 实操案例:
- 标定一台 6 自由度机械臂的 DH 参数,并对标定结果给出分析说明
- 完成 GB 12642 全项测试,以及测试报告的输出
- 基于 SpatialAnalyzer 完成机械臂基坐标系标定,以及绝对定位精度测试报告的输出
4. 交付物要求
- 培训手册:包含标定步骤、测试流程及故障排查。
- 测试模板:GB 12642 标准报告格式(含数据记录表)。
备注:请 Leica 团队提供定制化培训方案
5. 其他需求
- 是否可以定制化轨迹,完成测试项目以及报告输出?
- 覆盖 GB 12642 标准测试项目 所有测试
- 基于 SA 软件测试停止时间和停止距离不